

Didalam Proyek ini menyajikan desain robot pengangkat barang mini yang dapat menyimpan dan mengambil objek ke / dari slot penyimpanan tertentu dari / ke pangkalan menggunakan remote control Bluetooth hc-05. Komponen khusus yang Anda perlukan adalah motor roda gigi dengan sumbu 55mm 60RPM, penggunaan motor untuk mengangkat barang dengan mulus ke atas dan ke bawah.
Rangkaian skematik

Cara pembuatan hardware
Solder motor dc gearbox

Masukkan motor roda gigi ke bagian rangka dasar.






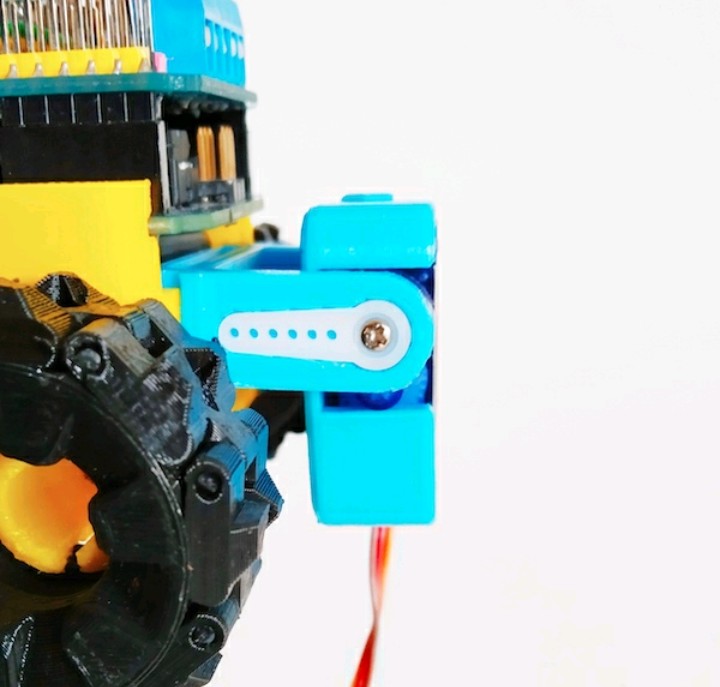
Pasang dan kencangkan lengan servo dan konektor servo ke servo case assembly seperti yang ditunjukkan gambar di bawah ini.
Pasang rakitan rangka dasar ke dalam rakitan kotak servo.


<<
AF_DCMotor MotorL(1); // Motor for drive Left on M1
AF_DCMotor MotorR(2); // Motor for drive Right on M2
AF_DCMotor MotorFork(3); // Motor for drive fork Up/Down on M3
const int buzPin = 2; // set pin 2 as buzzer pin (use active buzzer)
Servo servo1; // create a servo object servo1
int valServo;
String readString, action, Lspeed, Rspeed, actionDelay, stopDelay; // declaring multiple strings
void setup(){
Serial.begin(115200); // set up Serial library at 115200 bps
Serial.println("*SMARS Forklift Mod*");
pinMode(buzPin, OUTPUT); // sets the buzzer pin as an Output
servo1.attach(10); // tell the servo1 object that its servo is plugged into pin 10
servo1.write(25); // move the servo to the 25 degree position
// Set the speed to start, from 0 (off) to 255 (max speed)
// sometimes the motors don't have the same speed, so use these values tomake your SMARS move straight
MotorL.setSpeed(255);
MotorR.setSpeed(
MotorR.setSpeed(255);
MotorFork.setSpeed(
MotorFork.setSpeed(255);
// turn off motor
MotorL.run(RELEASE);
MotorR.run(RELEASE);
MotorFork.run(RELEASE);
}
void loop() {
while (Serial.available() > 0) {
char c = Serial.read(); // gets one byte from serial buffer
readString += c;
if (c == '\n') {
Serial.println("---------------");
Serial.print(readString); // prints string to serial port out
int n1;
int n2;
// separate the string that receive from serial buffer into several substring
action = readString.substring(0, 1);
Lspeed =
Lspeed = readString.substring(1, 4);
Rspeed =
Rspeed = readString.substring(4, 7);
Serial.println(action);
Serial.println(Lspeed);
Serial.println(Rspeed);
char carray1[7]; // declaring character array
Lspeed.toCharArray(carray1, sizeof(carray1)); // passing the value of the string to the character array
n1 = atoi(carray1); // convert char/string to a integer value
char carray2[7];
Rspeed.
Rspeed.toCharArray(carray2, sizeof(carray2));
n2 = atoi(carray2);
n2 = atoi(carray2);
Serial.println(n1); // prints integer value n1 to serial port out
Serial.println(n2); // prints integer value n2 to serial port out
readString = "";
// move forward
if(action.equals("F")){
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(FORWARD);
MotorR.run(FORWARD);
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(FORWARD);
MotorR.run(FORWARD);
// move backward
} else if(action.equals("B")){
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(BACKWARD);
MotorR.run(BACKWARD);
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(BACKWARD);
MotorR.run(BACKWARD);
// turn left
} else if(action.equals("L")){
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(BACKWARD);
MotorR.run(FORWARD);
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(BACKWARD);
MotorR.run(FORWARD);
// turn right
} else if(action.equals("R")){
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(FORWARD);
MotorR.run(BACKWARD);
MotorL.setSpeed(n1);
MotorR.setSpeed(n2);
MotorL.run(FORWARD);
MotorR.run(BACKWARD);
// turn the fork up
} else if(action.equals("U")){
MotorFork.setSpeed(n1);
MotorFork.run(FORWARD);
MotorFork.setSpeed(n1);
MotorFork.run(FORWARD);
// turn the fork down
} else if(action.equals("D")){
MotorFork.setSpeed(n1);
MotorFork.run(BACKWARD);
MotorFork.setSpeed(n1);
MotorFork.run(BACKWARD);
// turn the fork off
} else if(action.equals("T")){
MotorFork.run(RELEASE);
MotorFork.run(RELEASE);
// stop
} else if(action.equals("S")){
MotorL.run(RELEASE);
MotorR.run(RELEASE);
MotorL.run(RELEASE);
MotorR.run(RELEASE);
// turn on horn
} else if(action.equals("H")){
digitalWrite(buzPin, HIGH);
delay(120);
digitalWrite(buzPin, LOW);
delay(100);
digitalWrite(buzPin, HIGH);
delay(120);
digitalWrite(buzPin, LOW);
// set position of servo for tilt angle
} else if(action.equals("V")){
servo1.write(n1);
servo1.write(n1); // move the servo position depend on value n1
delay(15);
}
}
}
}
}
}
}
}
Tidak ada komentar:
Posting Komentar